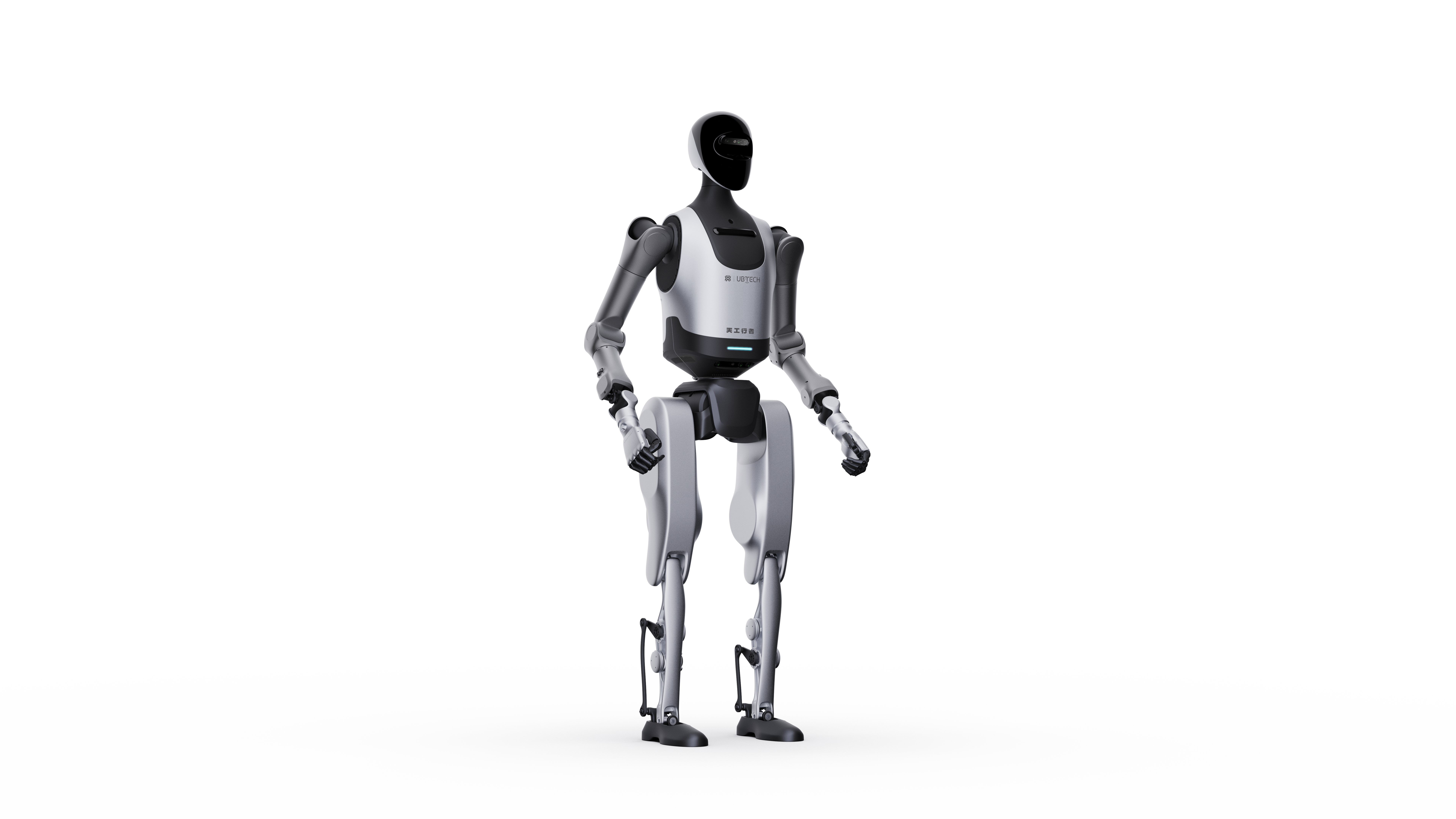
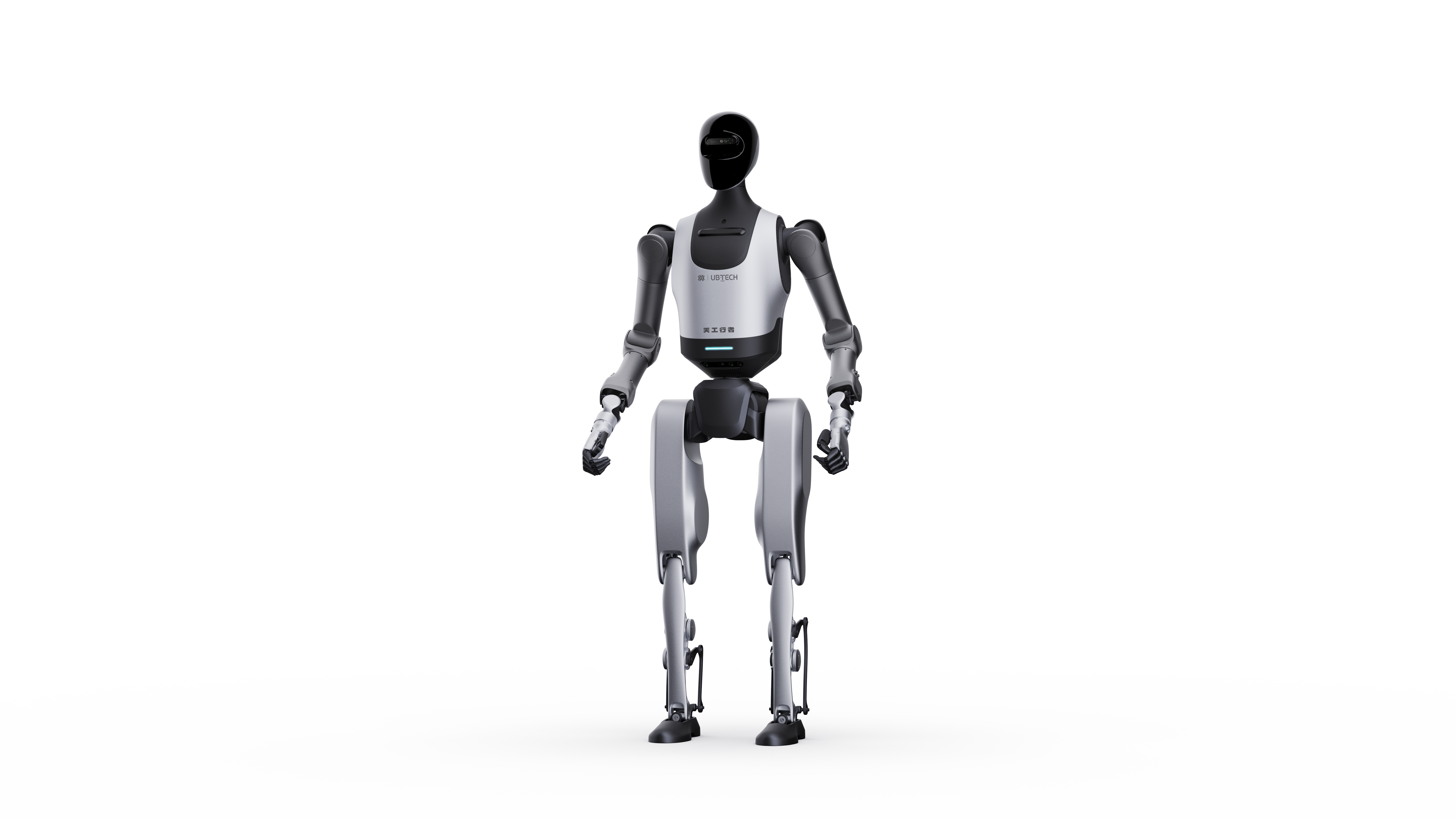
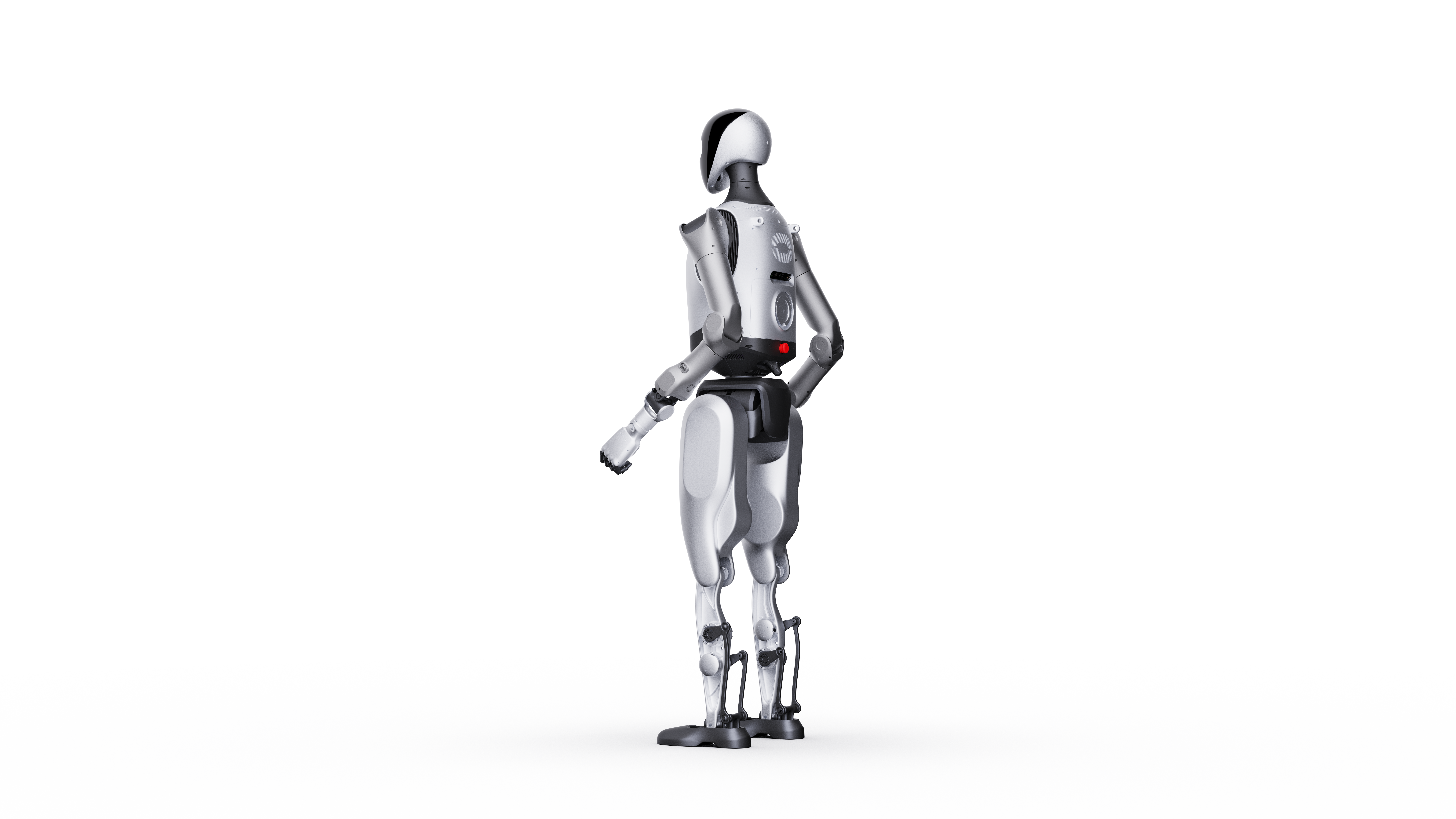
robot dan sgyr
Mae'r robot dan arweiniad yn cynrychioli datblygiad ar y ffiniau mewn technoleg llywio annibynnol, gan gyfuno sensuron cymhleth, ymwybyddiaeth artiffisial, a pheirianneg fekanegol berffaith. Mae'r peiriant ymddibynadwy hwn wedi'i ddylunio i lywio amgylcheddion cymhleth yn annibynnol tra bod yn perfformio amryw o weithgareddion â pherfformiad eithriadol. Wedi'i gyffwrdd â systemau LiDAR uwch a chamerau lluosog, mae'r robot yn creu mapiau manwl o'i amgylchedd a'u diweddaru yn fyw. Mae ei uned brosesu cryf yn caniatáu penderfynu'n gyflym a chynllunio llwybrau, gan ganiatáu iddo addasu at amgylcheddion newyddion yn effeithiol. Mae gan y robot architecure ddylunio modiwlar, sy'n ei wneud yn addas ar gyfer amryw o gymwysterau ar draws y diwydiant, o logisteg ystorfa i fasilwyr iechyd. Gyda'i rhyngwyneb defnyddiwr ystyrlon, gall weithredwyr yn hawdd raglennu llwybrau, gosod tasgau, a chyn monitorio metrigau perfformiad. Mae nodweddion diogelwch y robot yn cynnwys canfod gwrthrychau, mecanweithiau stop brys, a chydnabod presenoldeb dynol, gan sicrhau gweithredu diogel yn y gofod rhannu. Mae ei oes batri hir yn cefnogi oriau gweithredu hir, tra bod y gallu tario awtomatig yn lleihau'r amser nad yw'n weithredol. Mae cyswllt cwch y system yn caniatáu monitro bellach, dadansoddi data, a diweddariadau meddalwared, gan sicrhau perfformiad optimaidd a gwella'n barhaus. Mae'r robot dan arweiniad hwn yn cynrychioli cam mawr ymlaen mewn technoleg cymorth awtomatig, gan ofyn ymddiried, effeithloni a hyblygrwydd ar gyfer anghenion gweithredu modern.