robot dynollog
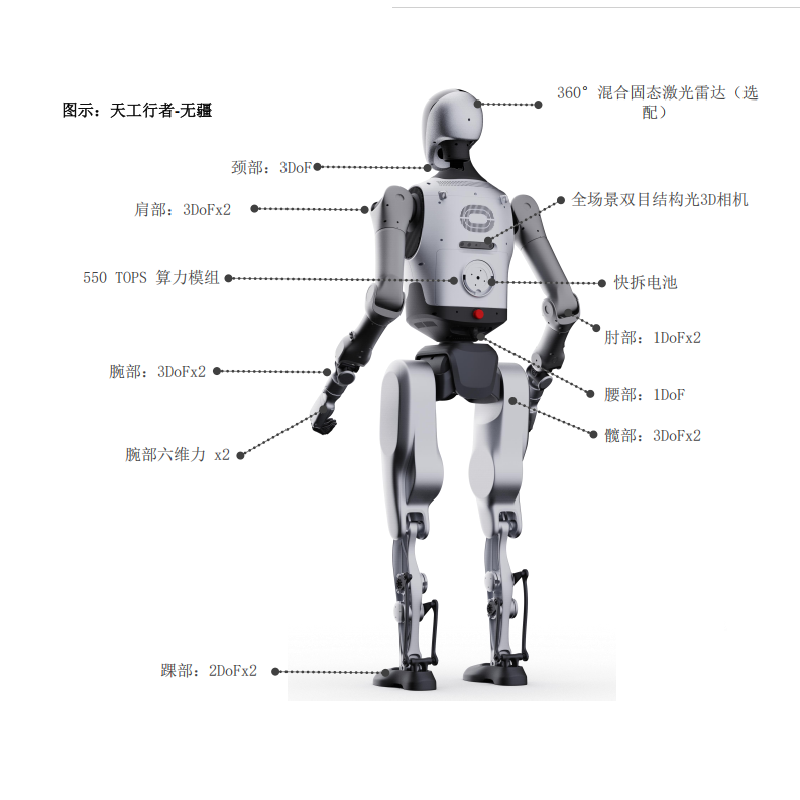
Mae robotau teithwyr yn cynrychioli datblygiad mawr yn y technoleg robotig, gan gyfuno trydarwch gyfoes â chyflwr corfforol tebyg i ddynolod. Mae'r peiriannau anhygoel hyn yn cael eu hymddwyn i adlewyrchu ffurf a symudiad dynol, sef sefyll yn syth gyda dwy droed, dwy droed a phen sydd â sensornau uwch. Maent yn integreiddio technolegau ar ymyl y cefn, gan gynnwys gweledigaeth gyfrifiadurol, prosesu iaith naturiol a algorithmiau dysgu addas i rymu cyweiriad naturiol â dynolod a'u hamgylchedd. Mae gan y robotau feirion a sensornau cywirdeb uchel yn y ffram, sy'n caniatáu symudiadau slym a chydweithredol sydd yn gallu adlewyrchu gweithredoedd dynol â hygrededd uchel. Mae eu swyddogaethau brif yn cynnwys cynnal gweithredoedd cymhleth mewn amgylcheddion amrywiol, o losgfa ar gyfer cynhyrchu i fanygion iechyd, tra maen nhw'n cadw cyweiriad yn ddiog ac yn ddelfrydol â chydweithredwyr dynol. Mae ganddynt gamerau, sensornau cryfder a phwyntiau sydd â sensitifrwydd i ddod o hyd iddyn nhw adlewyrchu amgylcheddion yn awtonomus a thrin gwrthrychau â hygrededd. Mae integreiddio dysgu peirianyddol yn caniatáu iddynt wella eu perfformiad dros amser, gan ddysgu o gydweithredoedd a'u ymddwyn yn ôl angen. Gellir eu rhaglennu ar gyfer amryw o gymwysterau, gan gynnwys gweithrediadau llinell asio, cymorth gofal cleifion, cymorth addysgol a gweithgarwch ymchwil a datblygu.