דף הבית > מוצרים > רובוט אינטראקטיבי של מודל גדול > רובי אמי



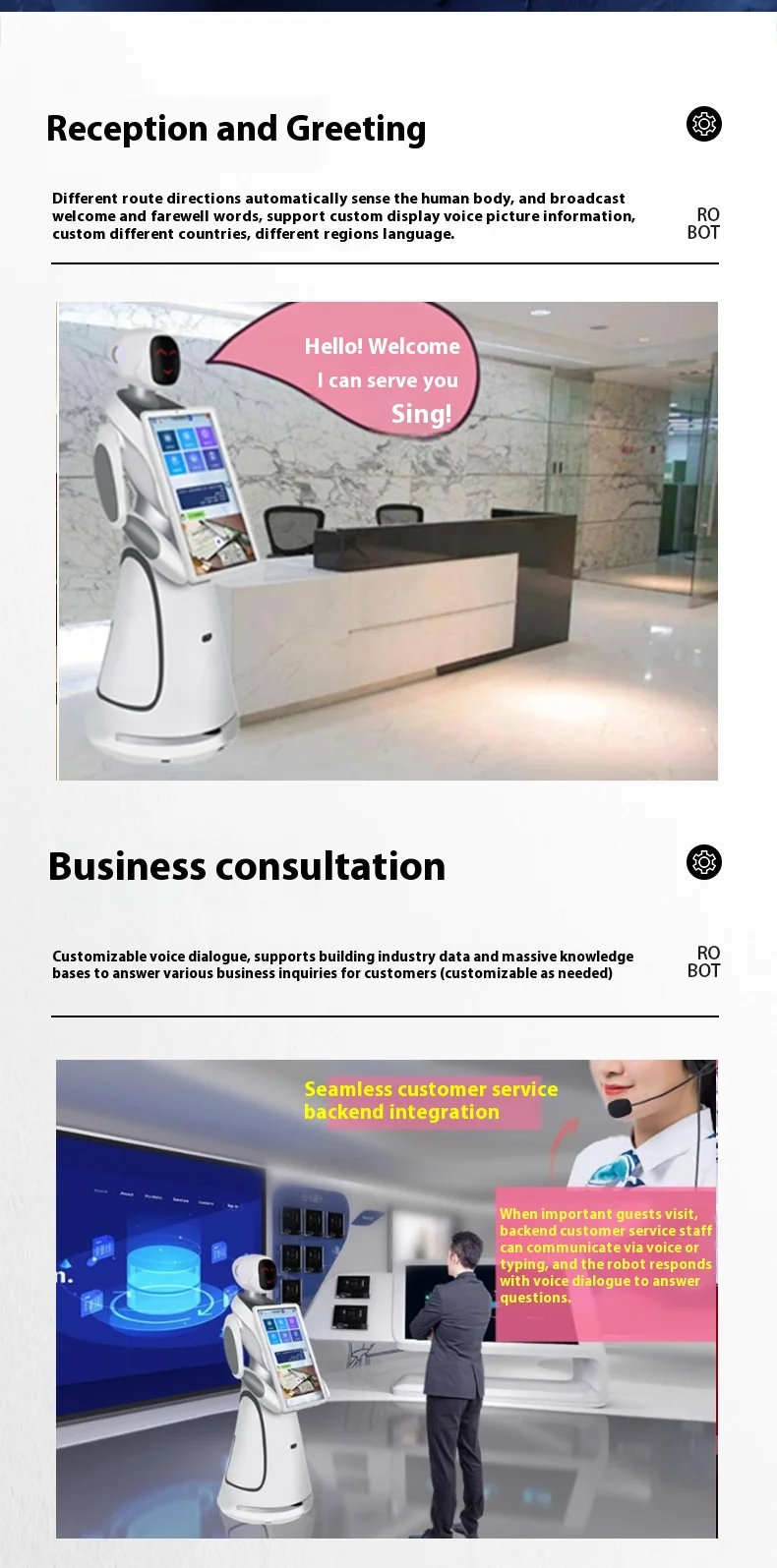
הרובוט מצטיין במתן הסברים ומידע ברורים, מה שהופך אותו לאידיאלי ללobbies, תערוכות, מרחבי קניות וסביבות עסקיות. הבינה המלאכותית המתקדמת שלו מאפשרת שיח טיבעי תוך זיהוי מדויק של אורחים חוזרים לצורך אינטראקציות מותאמות אישית. עם תמיכה בכמה שפות ויכולת תפעול 24/7, הרובוט לשירות לקוחות זה מפחית את עומס העבודה של הצוות ומביא תוצאות עקביות באיכות שירות גבוהה.





| פריט | ערך |
| מקום מוצא | סין |
| שימוש | מוצרי חומרי מזון לאירוח ובתי מחרחה |
| שם מותג | מיואו |
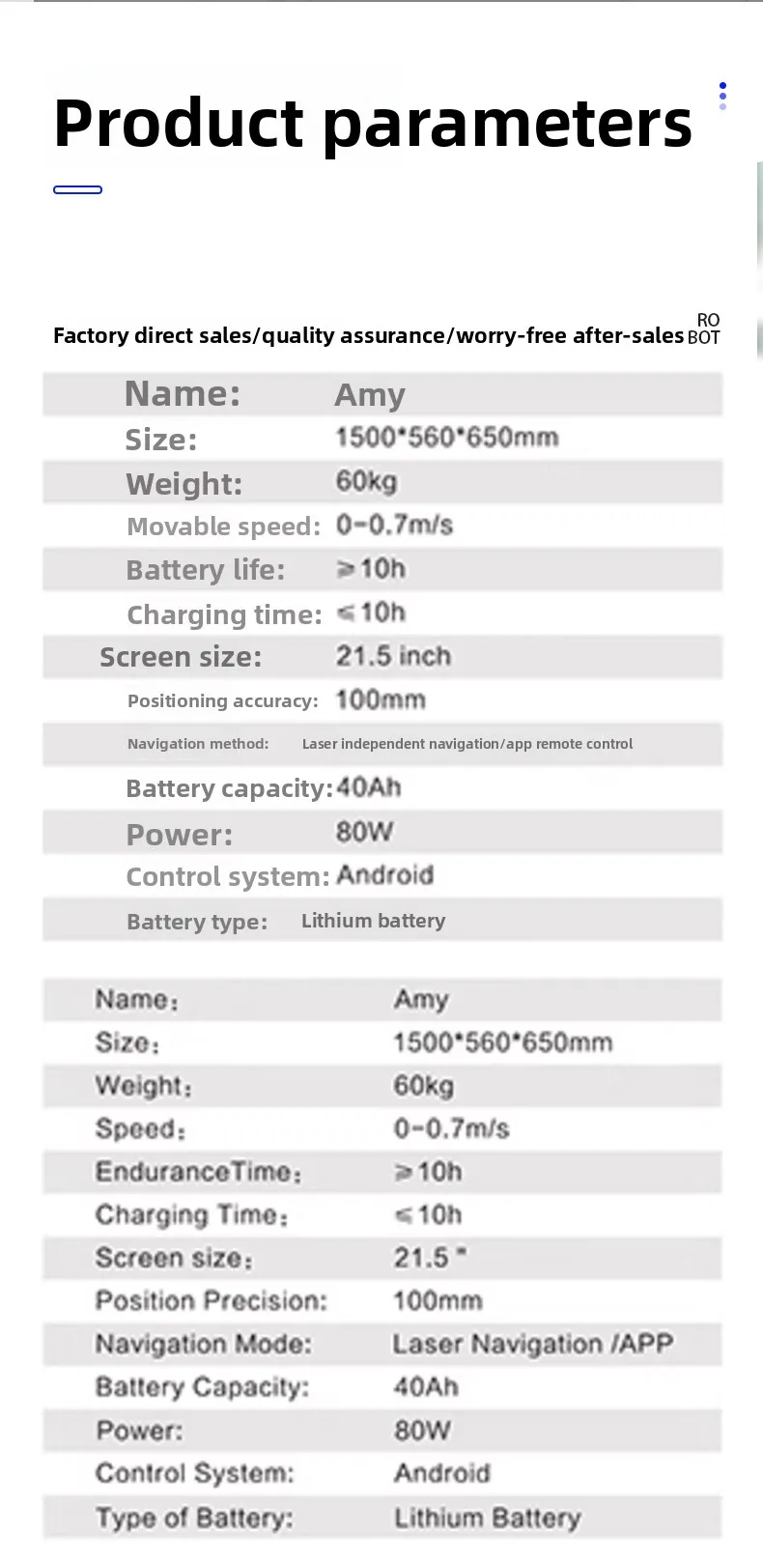
| מספר דגם | איימי |
| הרכבה | קיר מונח |
| חומר | פְלַסְטִיק |
| סוג | רובוט לעסקים |
| מתח | 110-240 וולט |
| מספר צירים | 6 |
| רמת IP | IP65 |
| משקל נשיאה | 50ק"ג |
| פונקציה | שליטה קולית |
| תחום יישום | פנימי |
1. מי אנחנו?
השאלה היא בסין, גואנגדונג, התחילה בשנת 2023, נמכרת ל -. בסך הכל יש לנו בערך - אנשים במשרד.
2. כיצד אנו יכולים להבטיח איכות?
תמיד ניקח דוגמה לפני ייצור מסיבי;
תמיד בדיקה סופית לפני שליחה;
3. מה אתם יכולים לקנות מאיתנו?
-
4. מדוע כדאי לכם לקנות מאיתנו ולא מספקים אחרים?
-
5. אילו שירותים אנו יכולים להציע?
תנאי משלוח מקובלים: -;
מטבע תשלום מקובל: -;
סוג תשלום מקובל: -;
שפות מדוברות: -
ממשק המסך: HDMI
מעבד גרפי / יחידת עיבוד ניורוני (GPU/NPU) aRM Mali-G610 MC4، 6 טרה-אופס; זיכרון RAM 8 ג'יגה-בייט, זיכרון ROM 64 ג'יגה-בייט; מערכת הפעלה: Android 14 ;
מעבד: RK3576, ארבעה ליבות Cortex-A72 וארבעה ליבות Cortex-A53, בתדר של 2.2GHz; יחידת עיבוד גרפית: Mali-T864; יחידת עיבוד גרפית: ARM Mali G52 MC3; יחידת עיבוד ניורוני: 6 טרה-אופס (INT8), תומכת בעריכת מעורבות INT4/INT8/INT16/FP16/TF32; זיכרון RAM: 8 ג'יגה-בייט זיכרון ROM: 64 ג'יגה-בייט; מערכת הפעלה: Ubuntu 22.04
WIFI (2.4GHz) / WIFI (5GHz)
|
מספר סדרה |
שם התכונה |
מבוא פונקציה |
|
1 |
תמונה חכמה |
לרובוטי שירות מבוססי בינה מלאכותית יש תמונה חכמה של קבלת פנים, אשר לא רק עוזרת ללקוחות לבצע משימות קבלת פנים ומערימה את הלחץ על משאבי האנושה, אלא גם משפרת את דימוי החברה ואת איכות השירות |
|
2 |
סידור הממשק |
1. אזור תצוגת הלוגו: המשתמשים יכולים להגדיר את הלוגו שלהם ברקע, ולאחר השלמת ההגדרה, הדף של הרובוט יציג את הלוגו שהוגדר |
|
2. אזור תצוגת ההנחיות הקוליות: במרכז המסך נמצא אזור תצוגת ההנחיות הקוליות, אשר יכול לכוון את המשתמש לביצוע אינטראקציה עם הרובוט באמצעות קול, ולעודד את המשתמש לומר משהו לרובוט |
||
|
3. אזור תצוגת הפונקציות הראשיות: מודולריזציה של הפונקציות הראשיות כדי לבליט את חשיבותן, ומציג הוראות תחת המודולים הראשיים כדי לשפר את חווית המשתמש; |
||
|
4. מודול הפונקציות הראשיות מוסיף תמונת IP ומציג את מילת ההפעלה של הרובוט, כדי לפתור את המצב המביך שבו המשתמשים אינם יודעים כיצד להפעיל את הרובוט |
||
|
5. תיבת האינטראקציה הקולית מציגה רק סבב אחד של דיאלוג, מה שגורם לממשק להיות ברור יותר, ובמקביל מסייע להגן על פרטיות המשתמש במידה מסוימת |
||
|
3 |
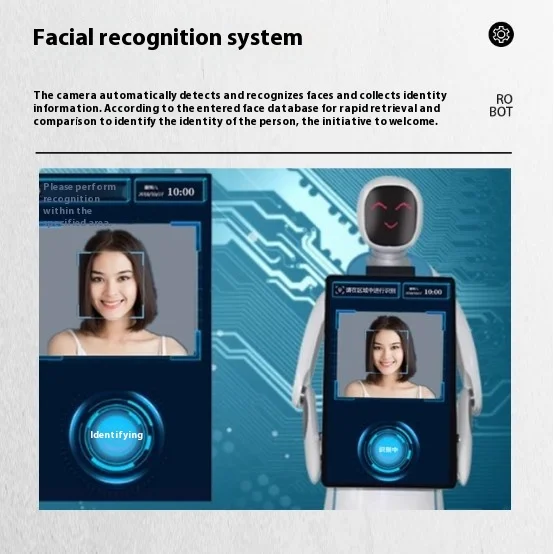
הכרה רב-מודלית |
התעוררות לפי פנים: אין איש במקום, זוהתה פנים, ונשמעת הודעה של ברוך הבא. |
|
התעוררות באמצעות LiDAR, אולטרסאונד ומכונת צילום עומק – כבויה כברירת מחדל; אם יש צורך להשתמש בה, ניתן להפעיל אותה בהגדרות – הגדרות כלליות (הכרה רב-מודלית מופעלת). |
||
|
הקשה על המסך להפעלה |
||
|
4 |
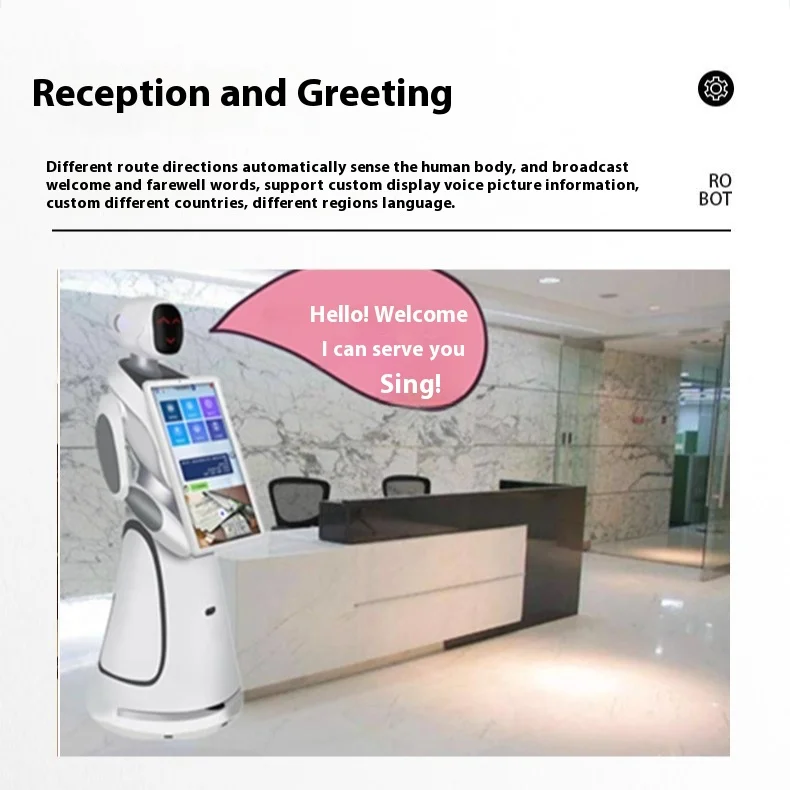
קבלת אורח |
כאשר זוהו פנים, הרובוט יפעל באופן עצמאי כדי לברך את האורח |
|
הודעת הברכה ניתנת להגדרה בפלטפורמת ניהול Little Bee הענן |
||
|
5 |
אינטראקציה קולית חכמה |
מערך של ארבעה מיקרופונים, זיהוי דיבור, אורחים מתנהלים עם הרובוט באמצעות קול; הרובוט מסוגל לזהות את קול האורח ולתת מענה לשאלותיו. |
|
ידע עשיר של ספריית הצ'ט, האורחים יכולים לנהל שיח פשוט עם הרובוט, לומר שלום מדי יום, לדון באקלים וכו'. חווית אינטראקציה טבעית וחדשה בין אדם למחשב. הוא תומך בדמויות 언גריות כגון Wenxin Yiyan ו- Deepsee , ותומך במשתמשים באימון דמויות 언גריות משל עצמם. |
||
|
6 |
שאלות ותשובות אינטליגנטיות מתוך ספריית מקצועית |
תומך Peláshim בהוספת ספריות מקצועיות דרך הרקע, ולאחר ההוספה, כאשר אורחים שואלים שאלות מקצועיות, הרובוט מחפש תשובות בתוך הספרייה המקצועית ונותן תשובות מקצועיות מתאימות. |
|
הוספת רקע לפורם של בסיס הידע: הוספה פריט בודד, ייבוא קבוצתי. סוגי שאלות נתמכים: טקסט, תמונה, שמע, וידאו, קישור היפר. תומך בהוספת מספר שאלות דומות ומילות מפתח לאותה שאלה. |
||
|
7 |
פרסום אינטליגנטי |
המשתמשים יכולים להוסיף תוכן שיווקי רלוונטי והקדמות קשורות במודול התוכן ברקע, ולתמוך בהצגת תוכן זה לאורחים בצורות מגוונות כגון תמונות, שמע, וידאו, טקסט וקול; כמו כן, לתמוך בכך שהמשתמשים יבחרו באופן עצמאי באילו תוכנים להציג, וכן לתמוך בהתאמה אישית של התוכן ושיטות ההצגה על ידי המשתמשים. |
|
8 |
הנחיית ביקור |
המשתמשים יכולים להוסיף את נקודות ההסבר שעליהן יש לבקר ברקע של ניהול הבוט/דבור, והמבקר ישלח את משימת הוויזיטה באמצעות קול, כאשר הרובוט יוביל את המבקר לנקודת ההסבר המתאימה. |
|
הגדרות נקודת הסבר: 1. המשתמשים חייבים להגדיר את השם, הקואורדינטות ומילות ההסבר של נקודת ההסבר (הכרחית) 2. ניתן להגדיר מספר כינויים לאותה נקודת הסבר, כולל כינויים להפעלת קול; הרובוט יבצע גם את משימת הווידוי 3. ניתן להוסיף חומרים תדמיתיים כגון קול, וידאו ותמונות בהגדרות הנקודה כדי לענות על הצרכים של משתמשים שמעוניינים לפרסם תוכן תוך כדי הליכה 4. ניתן להעתיק את הנקודה כדי לענות על הצרכים של אותה נקודת הסבר, ובכך לפשט את צעדי ההגדרה עבור משתמשי ביקור שונים שמשדרים תוכן הסבר שונה |
||
|
הגדרת מסלול הסבר: ניתן להגדיר מסלולים מרובים להסבר, ולהתאים אותם לפי הצרכים שלכם |
||
|
ביקור נקודתי בודד: 1. הרובוט יכול לבצע את המשימה של ביקור נקודתי בודד, והמשתמש מדבר בקול: "קח אותי לביקור ב־xx", והרובוט יבצע את משימת הביקור הנקודתי. 2. במהלך הביקור ניתן לדבר בקול: "לינגשי לינגשי", כדי להשהות את המשימה, לבטל אותה או להמשיך בה לאחר ההשהיה. הערה: המשך פירושו המשך המשימה מהצומת שבו הושהתה, ולא התחלת המשימה מחדש. |
||
|
ביקור באישור אחד (בעקבות המסלול): 1. הרובוט יכול לנהל את המשתמש בסיור לפי המסלול שנקבע מראש, והמשתמש יכול לבחור לאפשר למכונה לנהל את הסיור במסלול מסוים (ניתן לבצע סיור במסלול אחד בלבד בכל פעם). 2. במהלך הסיור ניתן לומר קולית: "לינגשי לינגשי", כדי להשהות את המשימה; לאחר ההשהיה ניתן לבטל את המשימה או להמשיך בה. בעת מעבר במסלול, נתמך מבצע דילוג לנקודת היעד הבאה; המשתמש יכול לומר קולית או ללחוץ על "הנקודה הבאה", והרובוט יעבור לנקודה הבאה. 3. כרגע ניתן לדלג על נקודות רק בסדר שהוגדר במסלול, ולא נתמך בחירה ישירה של נקודות מהמסלול. |
||
|
ביקור אופציונלי: 1. המשתמשים יכולים לבחור באופן חופשי לאילו נקודות לבקר, בהתאם להעדפותיהם האישיות. 2. אם נבחרו מספר נקודות, הרובוט יוצר מסלול חדש לפי סדר הבחירה ומנחה את המשתמש לביקור בנקודות. 3. במהלך הביקור ניתן לומר קולית: "לינגשי לינגשי", כדי להשהות את המשימה; לאחר ההשהיה ניתן לבטל את המשימה, להמשיך אותה, או – במקרה של ביקור במספר נקודות – לדלג על נקודה מסוימת: המשתמש אומר קולית או לוחץ על "הנקודה הבאה", והרובוט עובר לנקודה הבאה. |
||
|
9 |
ניווט והנחיית דרך |
1. פונקציית הניווט וההנחייה פועלת בעיקר כדי לפתור בעיות של התמצאות: כאשר משתמש מבקש מידע על מיקום, הרובוט מספק לו את פרטי המיקום של היעד, ולאחר מכן המשתמש יכול להחליט האם ברצונו שברובוט יבצע את פעולת ההנחייה. 2. במהלך תהליך ההנחייה ניתן לבטל את משימת ההנחייה. |
|
10 |
סיבובים ביטחוניים |
1. פונקציית סיור אבטחה חדשה: המשתמשים יכולים להגדיר מסלולי סיור בצד הרובוט, ולאחר הגעה לנקודת הסיור, הרובוט יבצע אוטומטית את משימות הסיור. 2. לאחר הגעה לנקודת הסיור, הרובוט יכול לצלם תמונות בנקודה קבועה (ניתן לקבוע), ולעלות את התמונות למסוף המקומי; המשתמשים יכולים לצפות בתמונות הסיור בזמן אמת ולרדות אותן |
|
11 |
תכונות בידור |
לרובוט יש פונקציות כגון שירה וסיפור סיפורים |
|
12 |
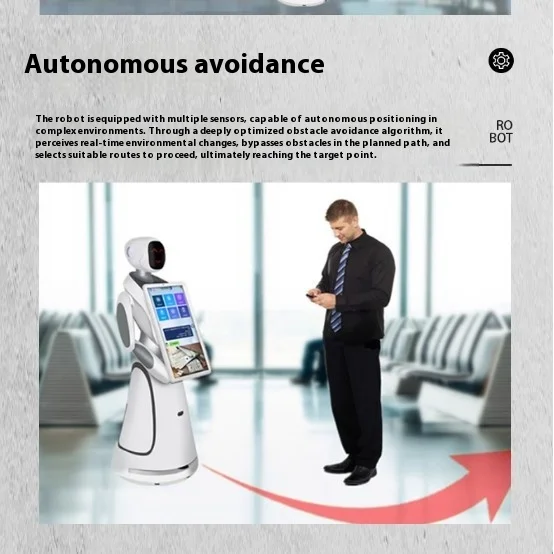
הימנעות פעילה ממפרעים |
בעת פגיעה במפרעים במהלך ההתנהלות, הרובוט יכול לעקוף אותם בקלות, לתכנן מחדש את הנתיב, להימנע מהמפרעים ולעבוד בצורה יעילת יותר ובצורה בטוחה יותר. |
|
13 |
כפתור עצירה מפלט |
כדי להבטיח את הבטיחות, ניתן ללחוץ על כפתור העצירה החירומית כדי לעצור את הרובוט בתנאים חריגים. |
|
14 |
טעינה אוטונומית |
כאשר רמת האנרגיה של הרובוט נמוכה, הוא יכול לחזור אוטומטית למדף הטעינה כדי להטעין את עצמו. |
|
15 |
הגדרה עצמית |
ניתן להגדיר את שם הרובוט, הלוגו וההודעה לברכה לפי הבחירה שלך. |
|
16 |
הפעלה ואישור אוטומטיים |
ניתן לקבוע את זמני ההפעלה והכיבוי של המכונה, והיא תחזור אוטומטית לכסא הבין-ברכה לאחר ההפעלה, ותחזור אוטומטית לעמדת הטעינה ותכבה את עצמה, ללא עזרה ידנית |
|
18 |
סרוק את התמונה |
ניתן לסרוק את התמונה באמצעות הטלפון הנייד |
|
מתקנת טכנולוגיית Lidar SLAM מתקדמת כדי ליצור באופן עצמאי מפות סביבתיות |
זכויות יוצרים © 2026 הולינג שינחאי, הולינג גואנגדונג, הולינג צ'ינגיואן, הולינג ג'ינרל, חברת ציוד חכם לתערוף שינחאי, י.ל. כל הזכויות שמורות. - מדיניות הפרטיות